測量機器を取り扱っている

「株式会社ジツタの営業担当さん」が
最新の

デモンストレーションに来てくれました!(^^)
取り敢えず要望を聞いてもらって
倉庫の中を測ってもらう事になり



任意のポイントを測位してから歩いて測定していきます。

基準となるポイントをいくつかとって
(最低4か所必要です!)

倉庫内へ歩きながら測量していきます!


問題なく測量は終わり
場所を変え
あらかじめ用意してくれていた


木が生えた林道の測量データを見せてもらっています。
(伐開前の開設工事でも使えそうです!)
総評を
「ICT活用事業部 部長」に聞いてみたところ
出来形管理には
「3次元計測技術を用いた出来形管理」に適応されていないため
もう少し先かと思いますが
起工測量だけをとれば
とても良く
保守費用も掛からないため
部長:「ぜひ!現場へ導入したい!」と
とても乗り気でした。
今後も


従来の「据えて測るTLS測量」や「飛行するドローン測量」は
変わらず必要ですが
災害現場や土工工事であれば据え直したり
立木がブラインドにならなくて
山間部の衛星が少ない場所や
その他 諸々良さそうです!
おまけ1
※SLAM(スラム)
(Simultaneous Localization and Mapping:自己位置推定同時地図作成)技術を利用したリアルタイム空間把握手法が登場しています。国土地理院では、センサにレーザを用いるLidarSLAM技術(自己位置推定と同時に周囲の点群を作成する技術)による測量を行うための「LidarSLAM技術を用いた公共測量マニュアル」を作成し、令和4年に公表しました。LidarSLAM技術による手持ち型や装着型のレーザスキャナは、歩行しながら計測できる特性を活かして、比較的狭い範囲を対象とした測量での利用が期待されます。
※国土交通省:
国土地理院 LidarSLAM(ライダースラム)技術を用いた公共測量マニュアルから抜粋
おまけ2

「ライダースラム」で測った点群データです↓

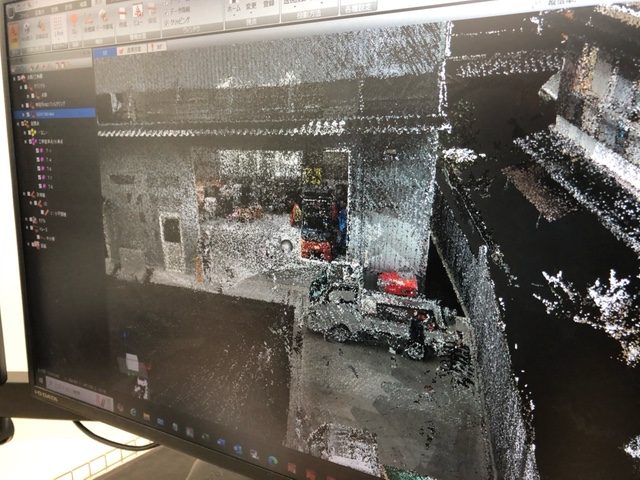

標高較差+0.017cm
水平較差+0.015cmともに
許容範囲(±0.05)以内でした。